Description électronique du robot hexapod
Architecture electronique
L'electronique du robot est architecturée autour d'un Basic Stamp II-sx de la société Parallax. Ce micro-controleur est assisté de 3 autres micro-controleur de type Pic-508 programmés par la société ferretronics vendus sous la reférence Ft639. Chacun de ces 3 Ft639 est capable de piloter 5 servo-moteurs cequi permet de controler les 13 servos de notre robot. Le BSII-sx communique ses ordres aux Ft639 via des lignes série : il n'y a pas de retour d'information ; Cependant les servo-moteurs embarquent eux aussi une partie electronique (systeme a potentiometre qui permet l'asservissement en position).
 Schéma de la carte
Schéma de la carte
Détails electronique en images ...
 Le BS2-sx à 50 Mhz !!
Le BS2-sx à 50 Mhz !!
 Le controleur de servo-moteurs
Le controleur de servo-moteurs
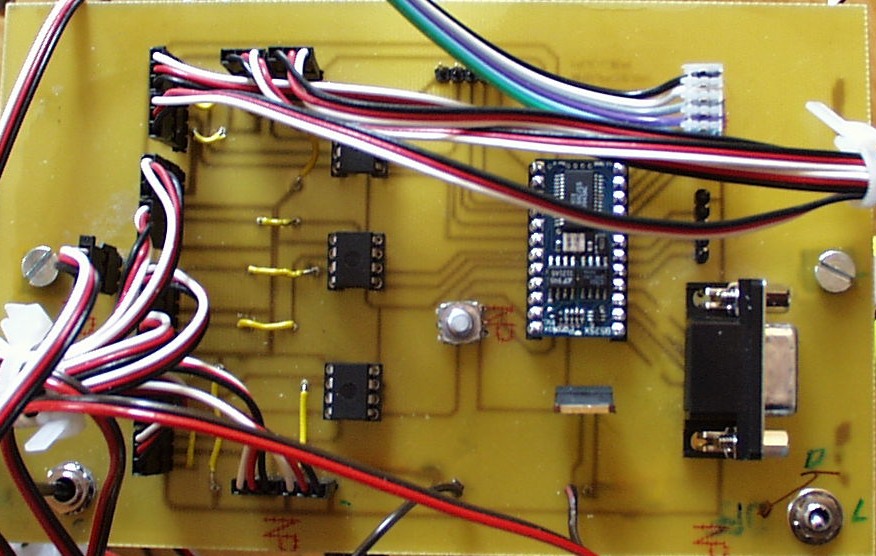 La carte
La carte