Description Mécanique du robot hexapod
Les éléments mécaniques
La structure du robot est constitué d'elements standard du commerce en aluminium :
- Tube carré de 10*10
- Tube rectangulaire de 10*12
- Poutre en u de 10*16
- Corniere et tube pour les antennes
L'aluminium offre un bon compromis resistance-masse-facilité à travailler-prix. Nous avons utiliser de la visserie standard (2,3,4 mm) pour les differents assemblages.
Afin d'empêcher les boulons de se desserer nous avons préféré la colle à d'autres solutions pour des raisons de poids.
Par ailleurs certains éléments proviennent de l'industrie mécanique :
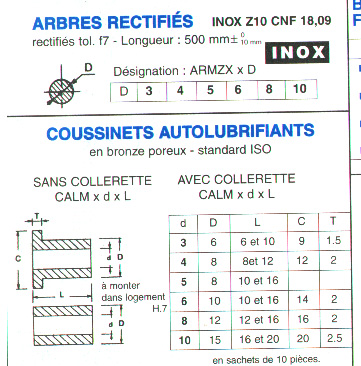
- Paliers en bronze fritté
- Axe rectifié de 3 mm
et d'autres du modélisme :
- Bagues d'arrêts de 2 mm
- Chape rotulé
- Tige fileté de 2mm
- Fixations pour têtes de servo-moteurs

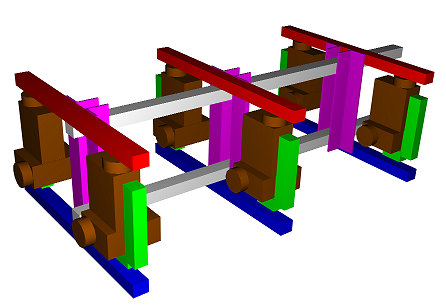
Vue 3D de l'assemblage mécanique
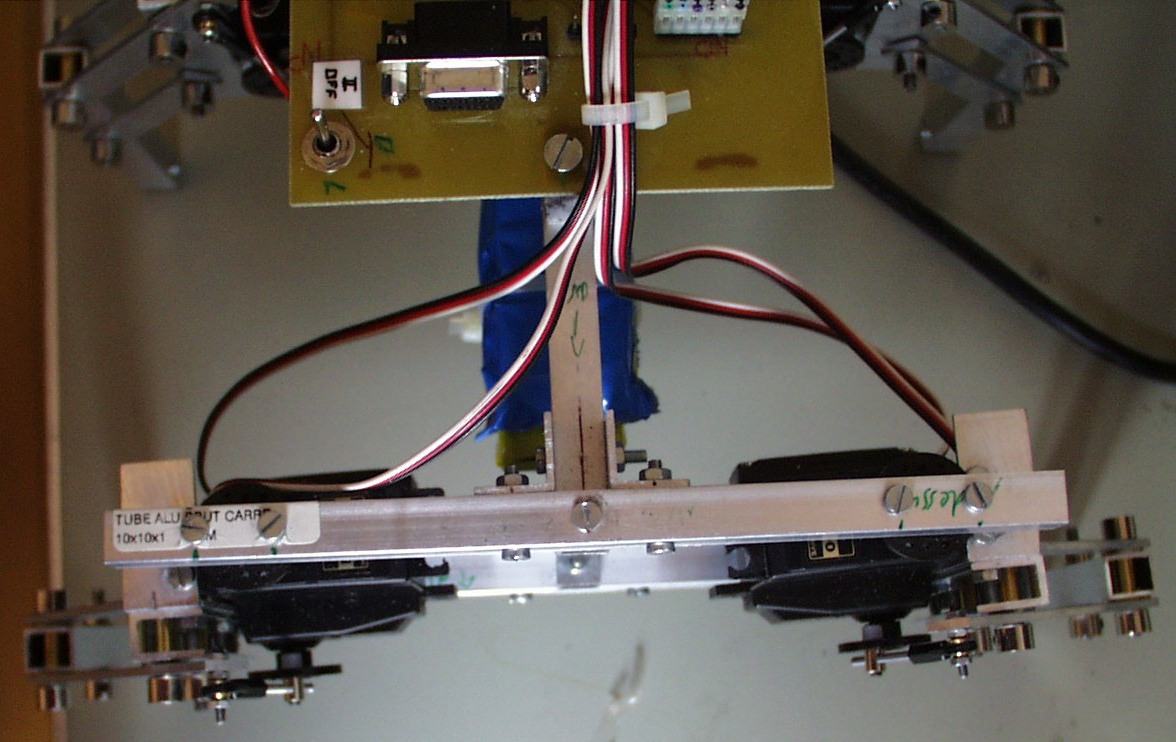
Vue du chassis et des servos de l'hexapod
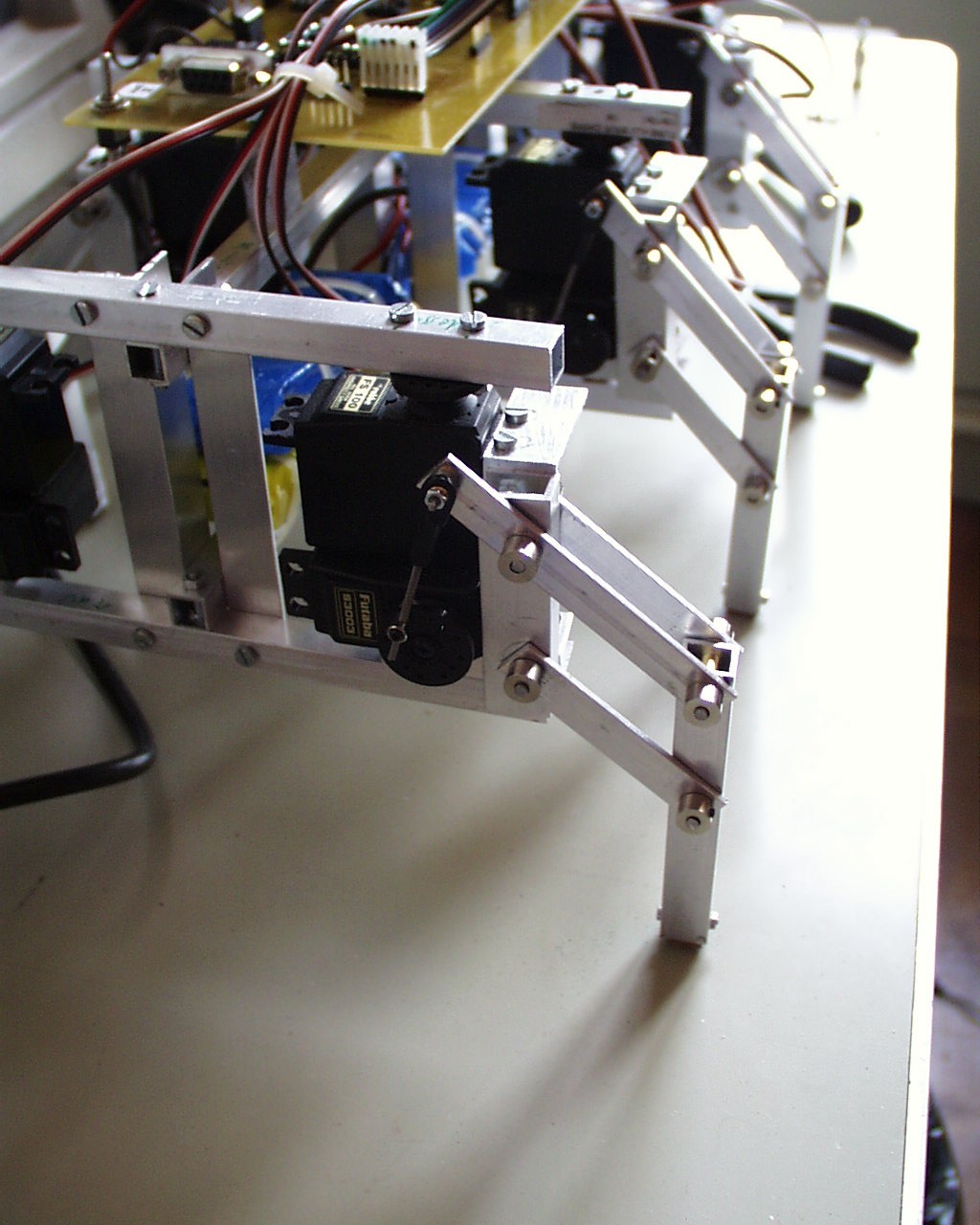
Photos des détails de la mécanique
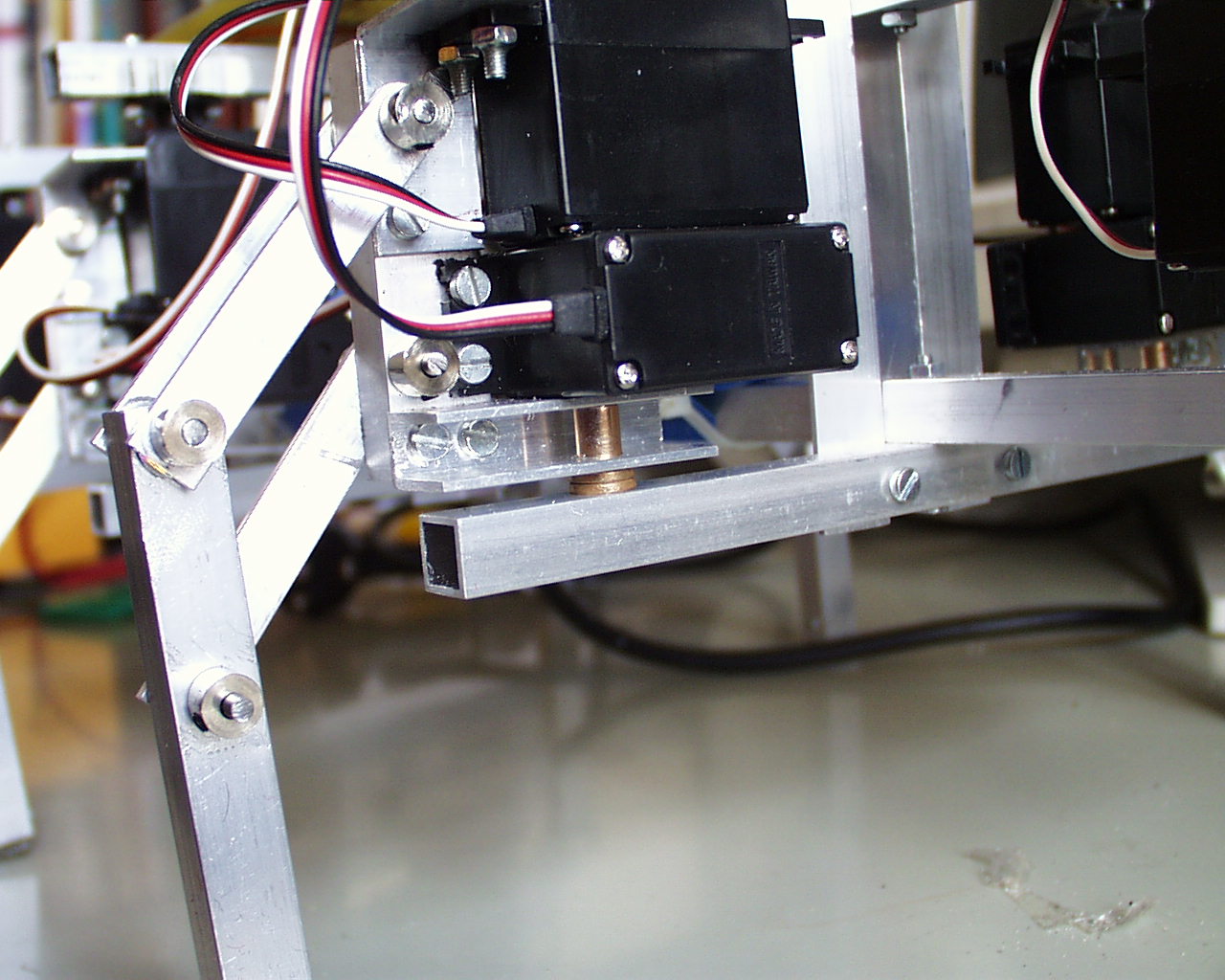
Vue arrière de l'hexapod

Détails des rotules en bronze de l'hexapod
Vue générale de l'hexapod
Vue du dessus du chassis de l'hexapod