Robot hexapod 13 servos moteurs
L'idée de départ
Notre projet consistait en la conception et la réalisation d'un robot capable d'évoluer dans un environement inaccessible à l'homme. Le robot devait pouvoir repérer un objet (comme une mine par exemple) pour permettre une intervention à distance.
Le projet Hexapod
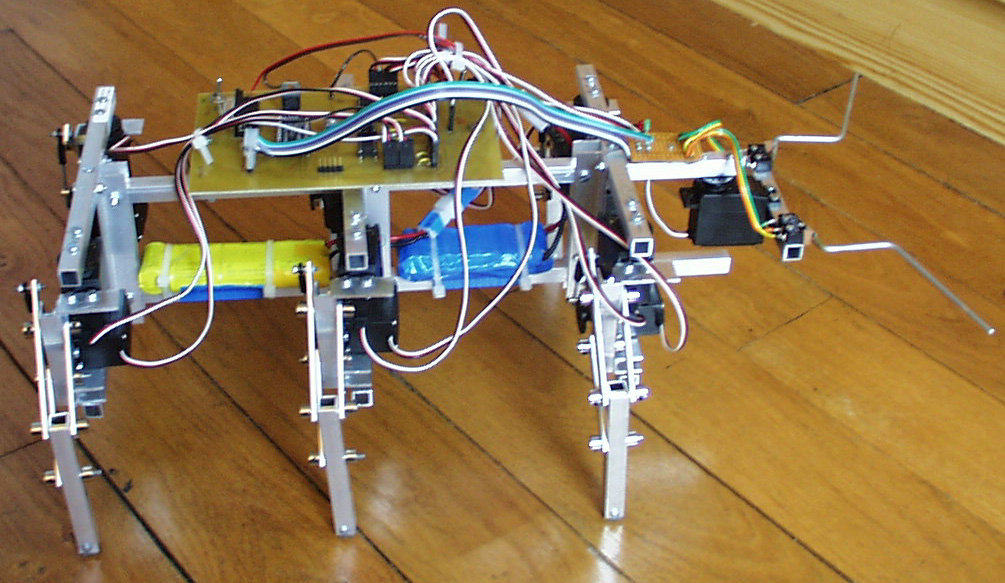
Nos choix technologiques nous ont amenés à concevoir un robot insectoïde autonome, capable d'explorer une zone inconnue. Suite à notre cours avec Mr MEYER (module vie artificielle) et à la lecture d'un rapport concernant un robot écrevisse (lien) autonome qui trouve les mines et les fait exploser ,nous avons changer l'orientation de notre projet.
Il n'est plus question de pilotage a distance mais notre robot insectoïde est capable d'evoluer dans un environement complexe, explorer la zone la plus importante possible jusqu'à déclencher la mine si l'environement en contient une. De plus l'architecture retenue permettrait dans l'avenir de lui adjoindre des senseurs supplémentaire, capteurs photosensibles, capteurs thermiques, infra-rouges ... voire un nez artificiel comme il commence à en apparaitre sur le marché.
Nous allons dans ce rapport vous présenter le fonctionnement du robot, notre cheminement dans le projet ainsi qu'une notice d'utilisation et toute autres information permettant de péréniser la somme des connaissances acquises lors de ce projet.